CloudCompare软件操作学习笔记(一) |
您所在的位置:网站首页 › rasmapper 如何导出计算栅格 › CloudCompare软件操作学习笔记(一) |
CloudCompare软件操作学习笔记(一)
|
1.点云读入:
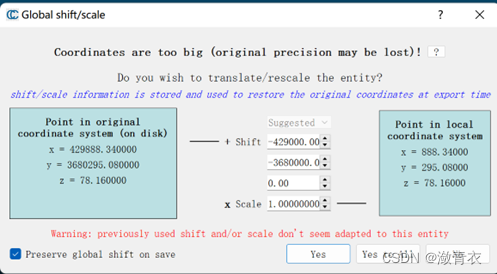
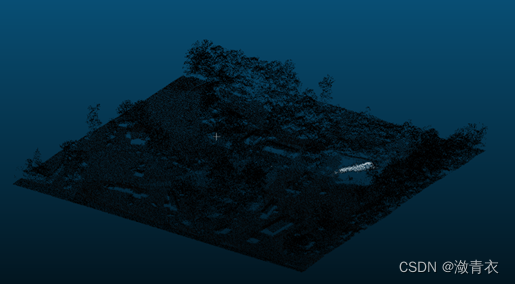
将文件拖拽至软件主界面处,或在菜单的open处打开点云文件
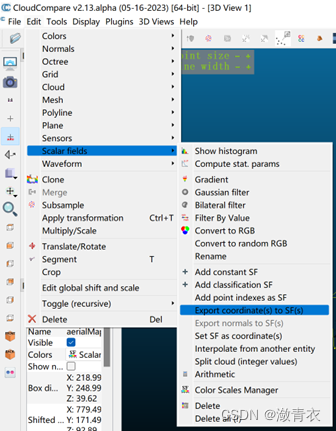
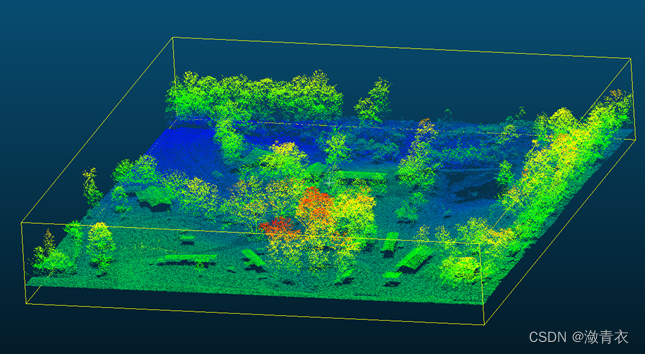
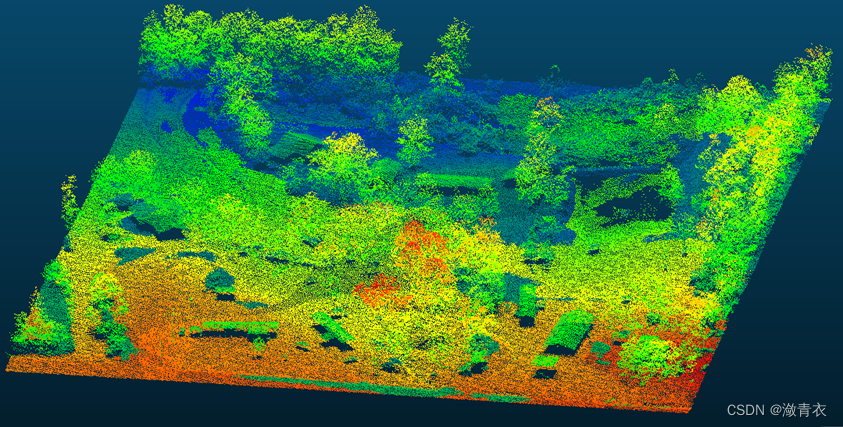
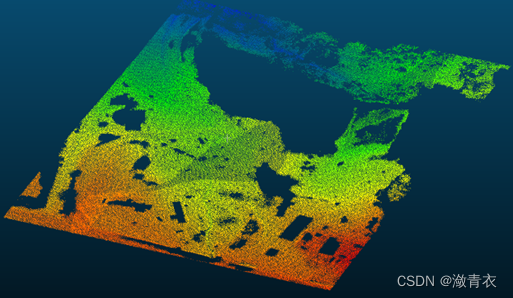
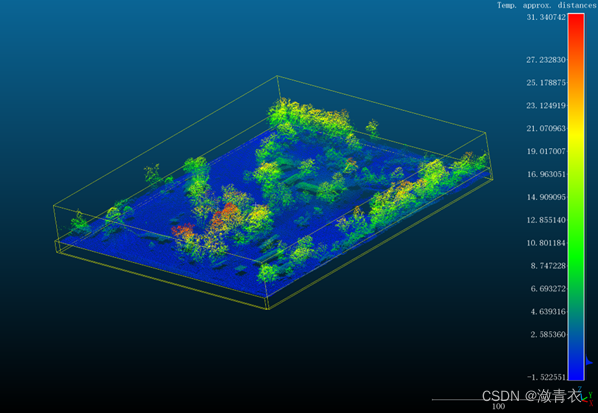
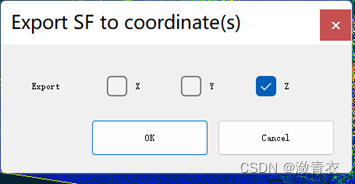
Global shift界面 点云读入后显示界面 2.高程赋色:方法一: 点击上方工具栏Edit >> Scalar fields >> Export coordinates to SF,选择按Z值渲染
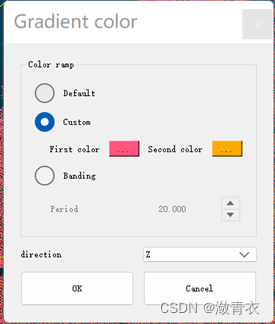
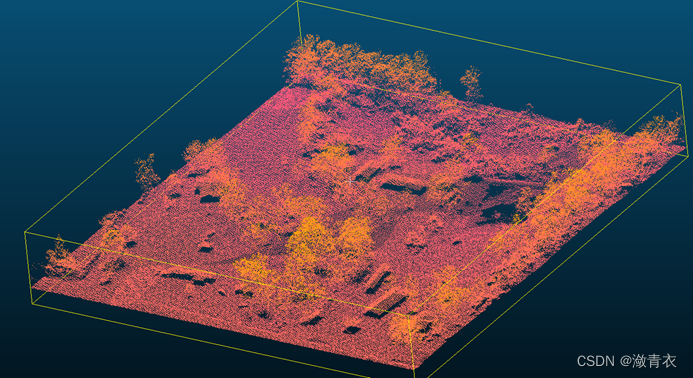
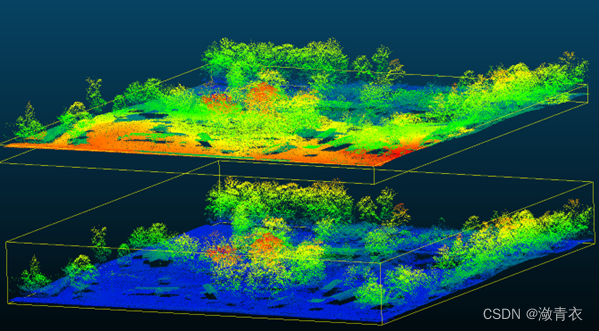
工具栏界面 渲染赋色后结果 方法二: 点击Edit >> Colors >> Height Ramp,里面有两个渲染方式,一个是Custom,一个是Banding,先用Banding方式,通过选择按照z值的最小单位来渲染,此处选择20米;后用Custom方式,通过选择第一渲染颜色和第二渲染颜色的方式来进行渲染,此处选择红色和橙色
Banding方式界面 赋色渲染后界面
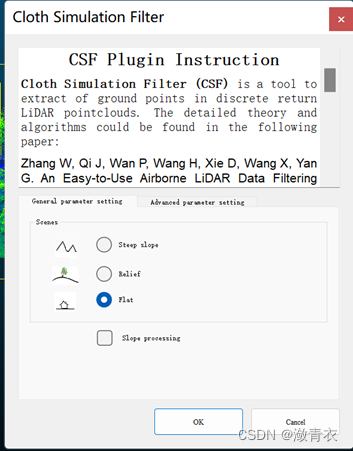
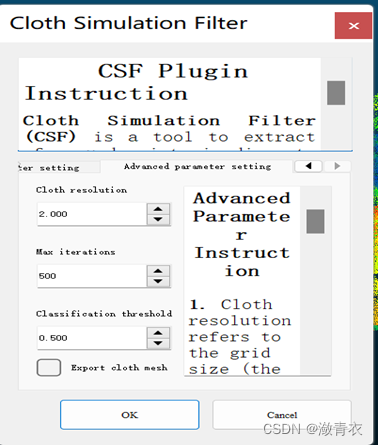
Custom方式 赋色渲染后界面 3. 地面滤波方法一:CSF地面滤波法 流程概述: 1) 利用点云Q 滤波算法或者点云处理软件滤除异常点 2) 将激光雷达点云倒置 3) 设置模拟布料,设置布料网格分辨率 具体软件操作: 点击Plugins中的CSF Filter功能,此处general parameter setting选择flat平地,advanced parameter setting中的布料格网分辨率设置为2,最大迭代次数设置为500,地面点与非地面点距离阈值设置为0.5; (Cloth resolution:是指用于覆盖地形的布的网格大小(单位与点云的单位相同),布分辨率越大,DTM越粗糙; Max iterations:是指地形仿真的最大迭代次数; Classification threshold:是指根据点与模拟地形之间的距离,将点云划分为地面和非地面部分的阈值)
general parameter setting窗口 advanced parameter setting窗口
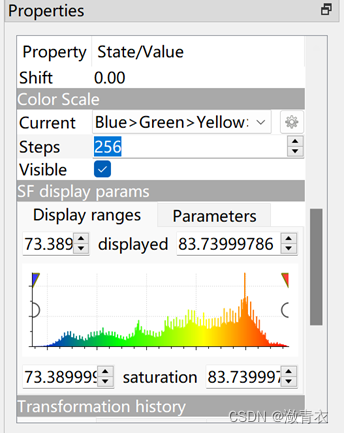
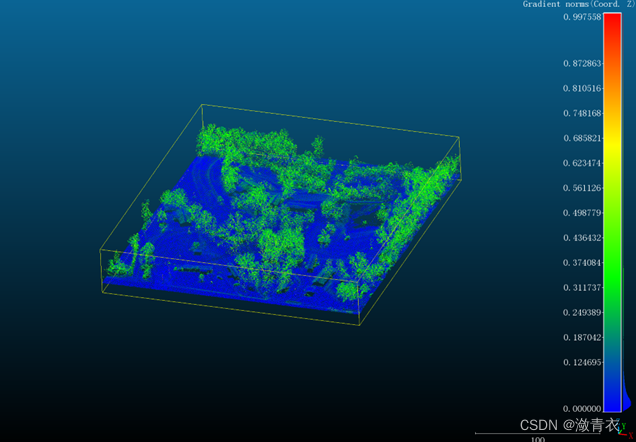
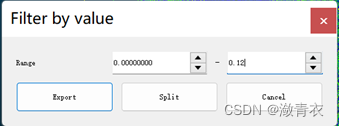
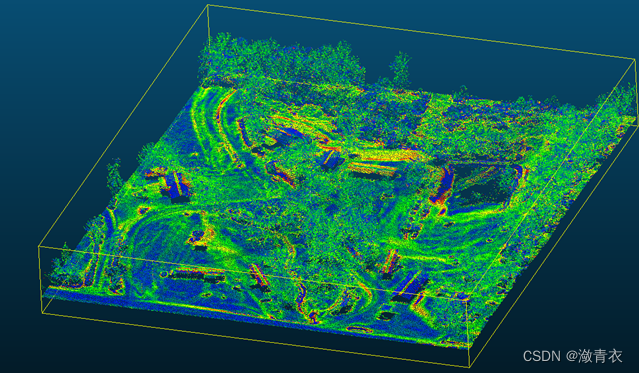
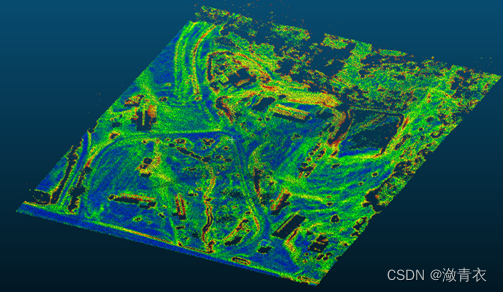
CSF地面滤波后结果 方法二:坡度法地面滤波 点击上方工具栏Edit >> Scalar fields >>Gradient计算标量域的梯度/坡度/倾斜度,对话框“Gradient字段是要用(欧几里德)距离进行计算吗?”选择是(标量域是点云实体的高程),在color scale界面勾选visible,根据右侧的坡度值分布色谱图,设置阈值; 点击上方工具栏Edit >> Scalar fields >>Filter By Value,坡度阈值设置为0.12,点击Split即可完成地面点与非地面点的分割。
Color scale界面 点云中每个点的坡度分布
Filter by value界面 滤波后结果 两种方法结果对比
CSF -Ground points CSF -Off-ground points
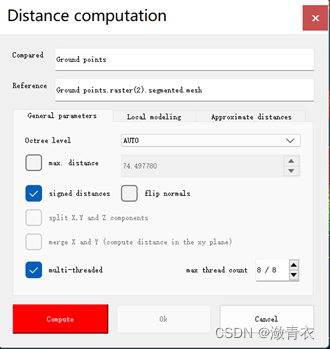
坡度法-Ground points 坡度法- Off-ground points 4.nDSM方法1:基于CSF滤波算法 先基于对CSF滤波结果(选择export to mesh)对地面网格执行平滑,点击Edit >> Mesh >>Smooth(Laplacian); 选择原始点云和生成的地面网格,点击Tools >> Distances >>Cloud/Mesh Dist,计算点云到网格的距离,Edit >> Scalar fields >>Set SF as Coordinate(s),将计算得到的距离赋值给Z轴
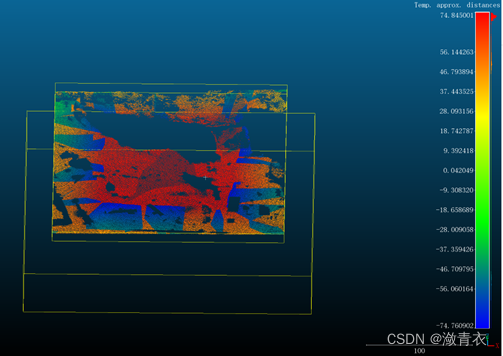
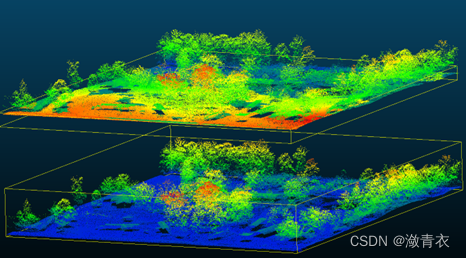
Distance computation窗口 计算结果
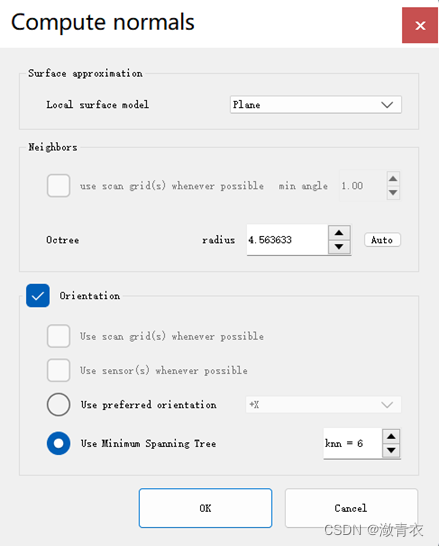
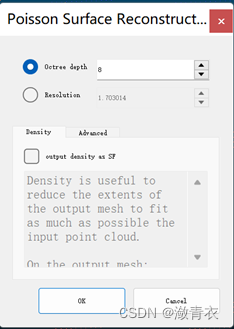
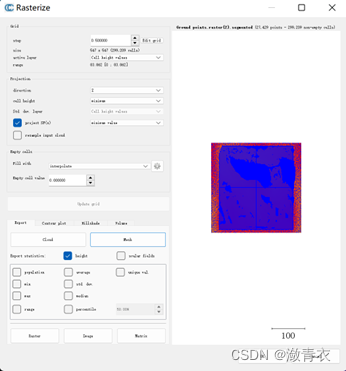
Set SF as Coordinate(s)窗口 归一化结果 方法2:泊松+栅格(需要已知地面点云) (1)计算粗DEM:选择地面点云, 插值计算分辨率为2米的DEM,打开Rasterize窗口,按下图所示参数输入,得到的DEM会存在错误值, 使用裁剪工具将其切除; (2)计算法向量:Edit>>normal>>compute,Neighbors选择auto; (3)执行泊松重建:选择右侧工具箱中的
Rasterize窗口 Compute normal窗口
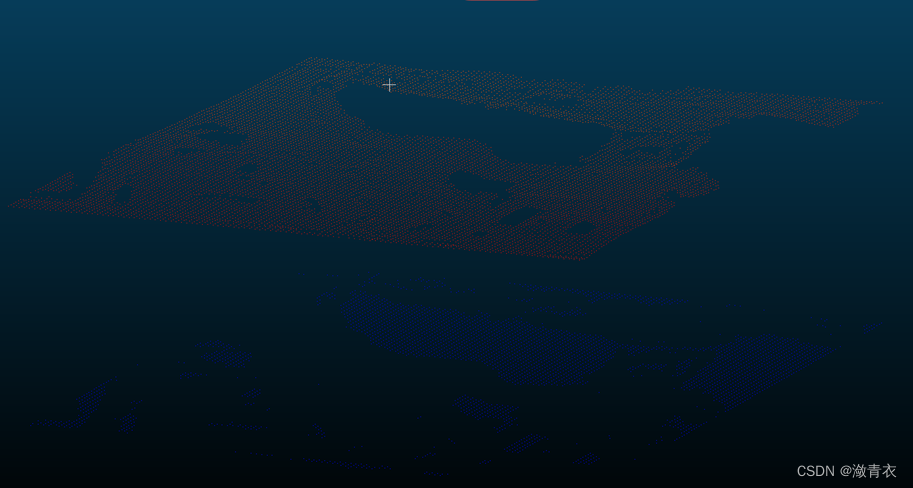
粗DEM计算结果
裁剪后结果
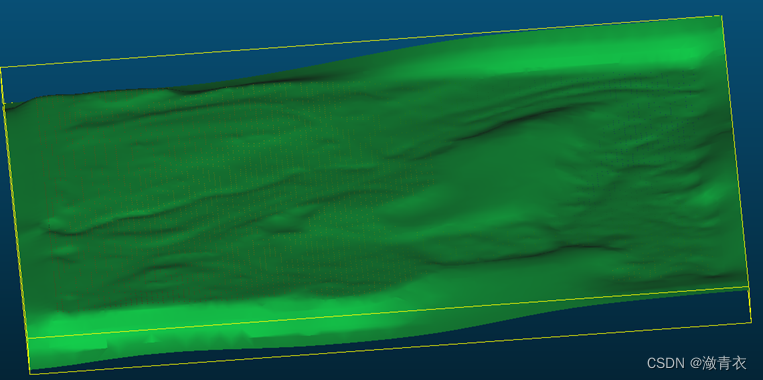
计算法向量 泊松重建窗口
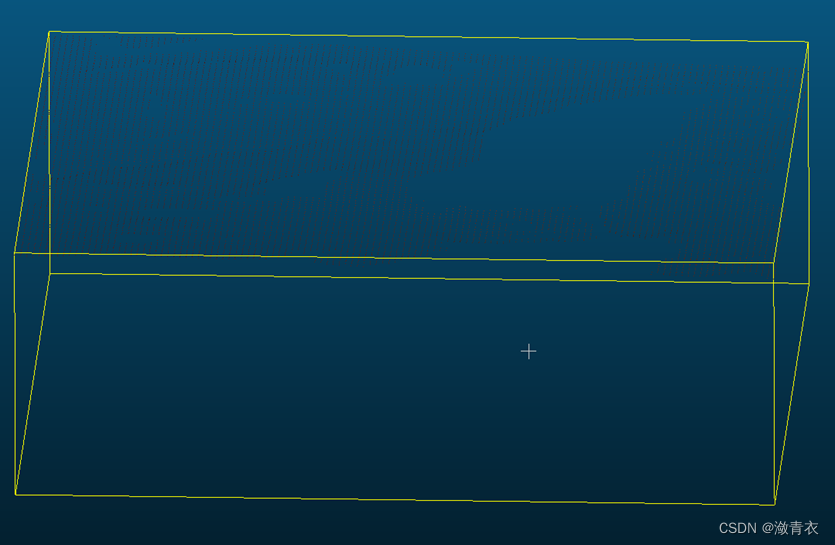
泊松重建结果 (4)粗DEM接边:裁剪泊松重建的结果,将泊松重建结果的边缘裁出来,然后点击上方工具栏中的
裁剪操作
裁剪结果 转为点云窗口
合并结果 (5)点击上方窗口的 (6)执行拉普拉斯平滑:点击Edit >> Mesh >>Smooth(Laplacian)
Rasterize窗口 拉普拉斯平滑后结果 (7)计算归一化高程:选择原始点云和平滑后的DEM,点击Tools >> Distances >>Cloud/Mesh Dist,计算它们之间的距离; 记录原始高度,选择原始点云, 将原始Z值储存为特征;
两种方法结果对比
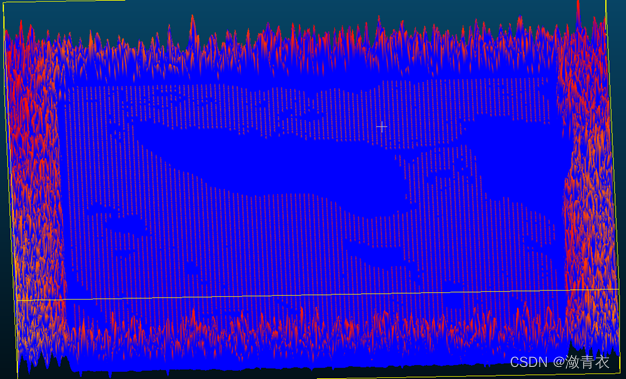
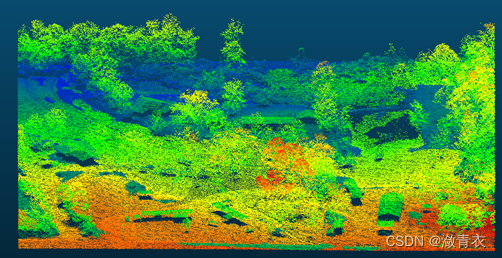
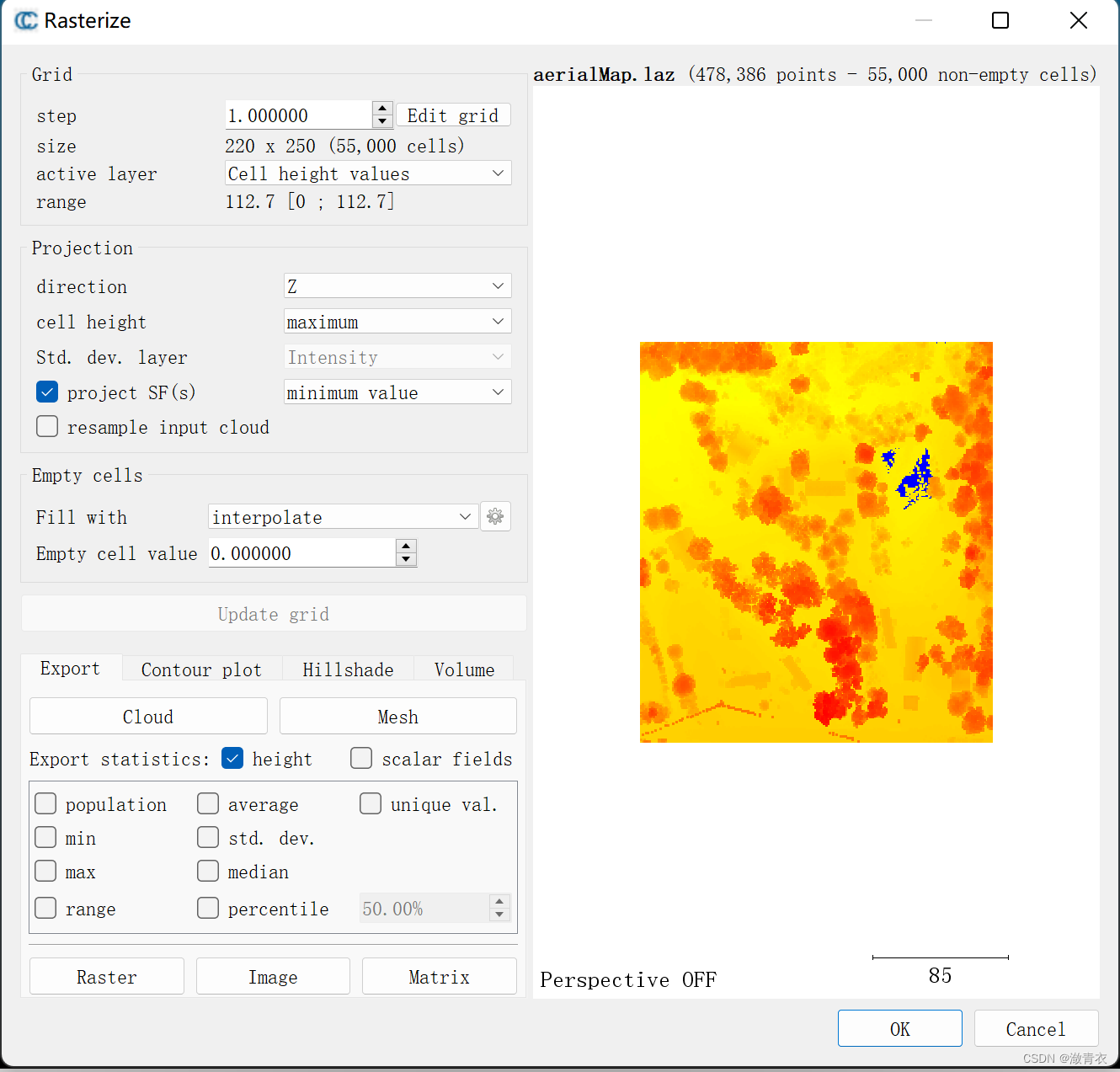
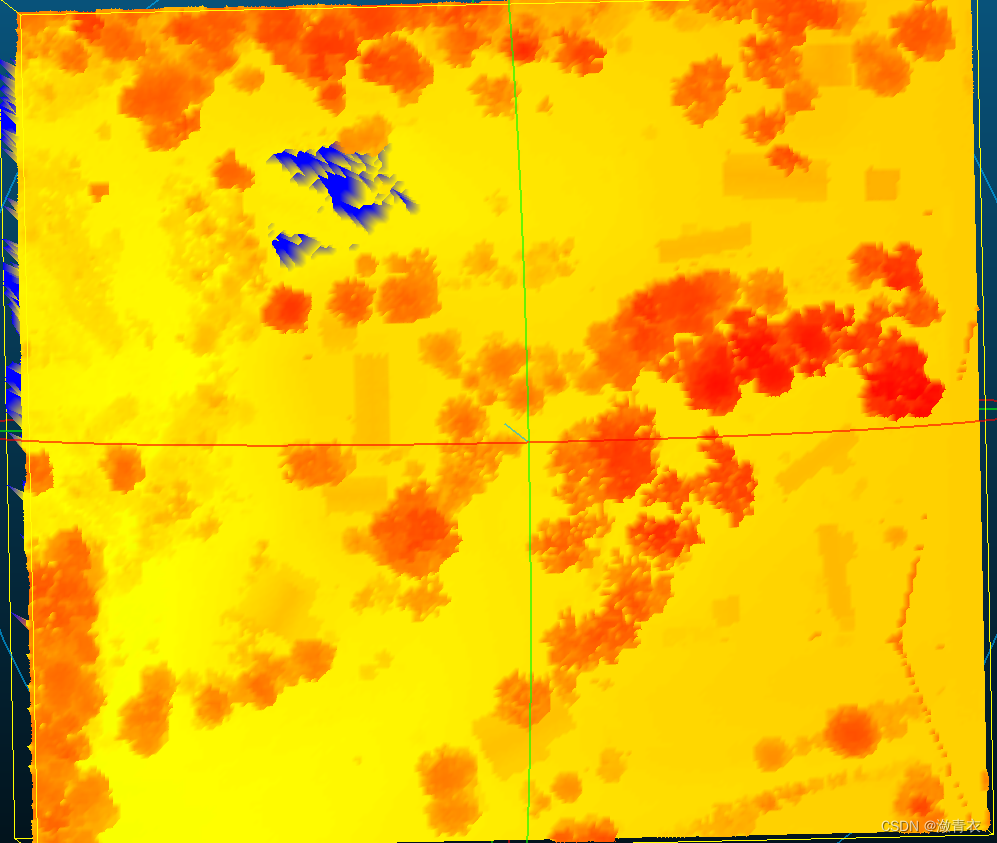
基于CSF 泊松+栅格 优点:操作简单、有理论支撑 优点:适用于崎岖地形,拟合效果好 缺点:CSF算法不适用于崎岖地形 缺点:需要首先计算/分类地面点云,如果DSM栅格不够小, 归一化后可能会出现栅格纹理 5.栅格化:使用“Tools > Projection > Rasterize”工具,点云“栅格化”(即将点云转换成2.5D网格),然后把它导出为新的点云图或光栅图像等,栅格化结果如下
|



 ,选择默认参数
,选择默认参数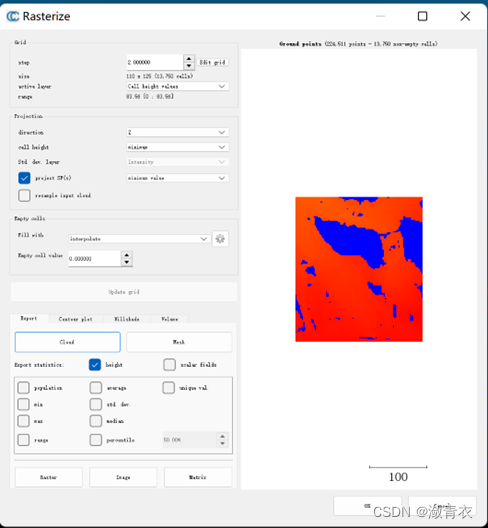
 对其进行合并;
对其进行合并;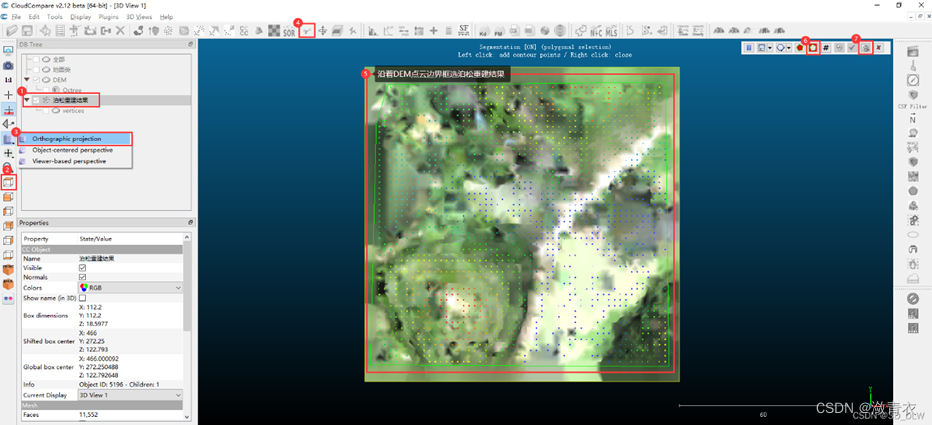

【本文地址】